英碩雙(多)絲杠同步驅(qū)動(dòng)解決方案
雙(多)絲杠同步驅(qū)動(dòng)大型部件的傳動(dòng)方案在機(jī)械設(shè)計(jì)中較為普遍����,尤其在機(jī)動(dòng)/高機(jī)動(dòng)雷達(dá)天線的俯仰����、折疊結(jié)構(gòu)中非常常見(jiàn)���,英碩的雙(多)絲杠同步驅(qū)動(dòng)方案基于雙(多)伺服電機(jī)的驅(qū)動(dòng)方案,可按照位置同步及負(fù)載均衡調(diào)配的要求�����,實(shí)現(xiàn)雙(多絲杠)推動(dòng)大型負(fù)載時(shí)多個(gè)電機(jī)之間的協(xié)同控制����,由該方案組合起來(lái)的驅(qū)動(dòng)系統(tǒng)具有如下顯著特點(diǎn):
1) 雙(多)電機(jī)的運(yùn)動(dòng)完全采用電子耦合,相互間無(wú)需機(jī)械聯(lián)結(jié)����;
2) 系統(tǒng)可按位置同步或負(fù)載均衡調(diào)配兩種方式,控制雙(多)絲杠電機(jī)的運(yùn)動(dòng)�;
3) 系統(tǒng)按位置同步和負(fù)載均衡方式工作時(shí),均可適應(yīng)系統(tǒng)結(jié)構(gòu)本身固有的位置偏差和非對(duì)稱性�;
4) 系統(tǒng)根據(jù)負(fù)載狀況及變化趨勢(shì),可智能化地控制雙(多)電機(jī)的速度設(shè)定����,實(shí)現(xiàn)負(fù)載的合理分配�����;
5) 系統(tǒng)可完成雙(多)絲杠同步驅(qū)動(dòng)負(fù)載的速度和位置(定位)控制���;
6) 雙(多)絲杠電機(jī)均采用CAN總線進(jìn)行聯(lián)控,各個(gè)電機(jī)驅(qū)動(dòng)器具有完備詳盡的實(shí)時(shí)信息監(jiān)控���;
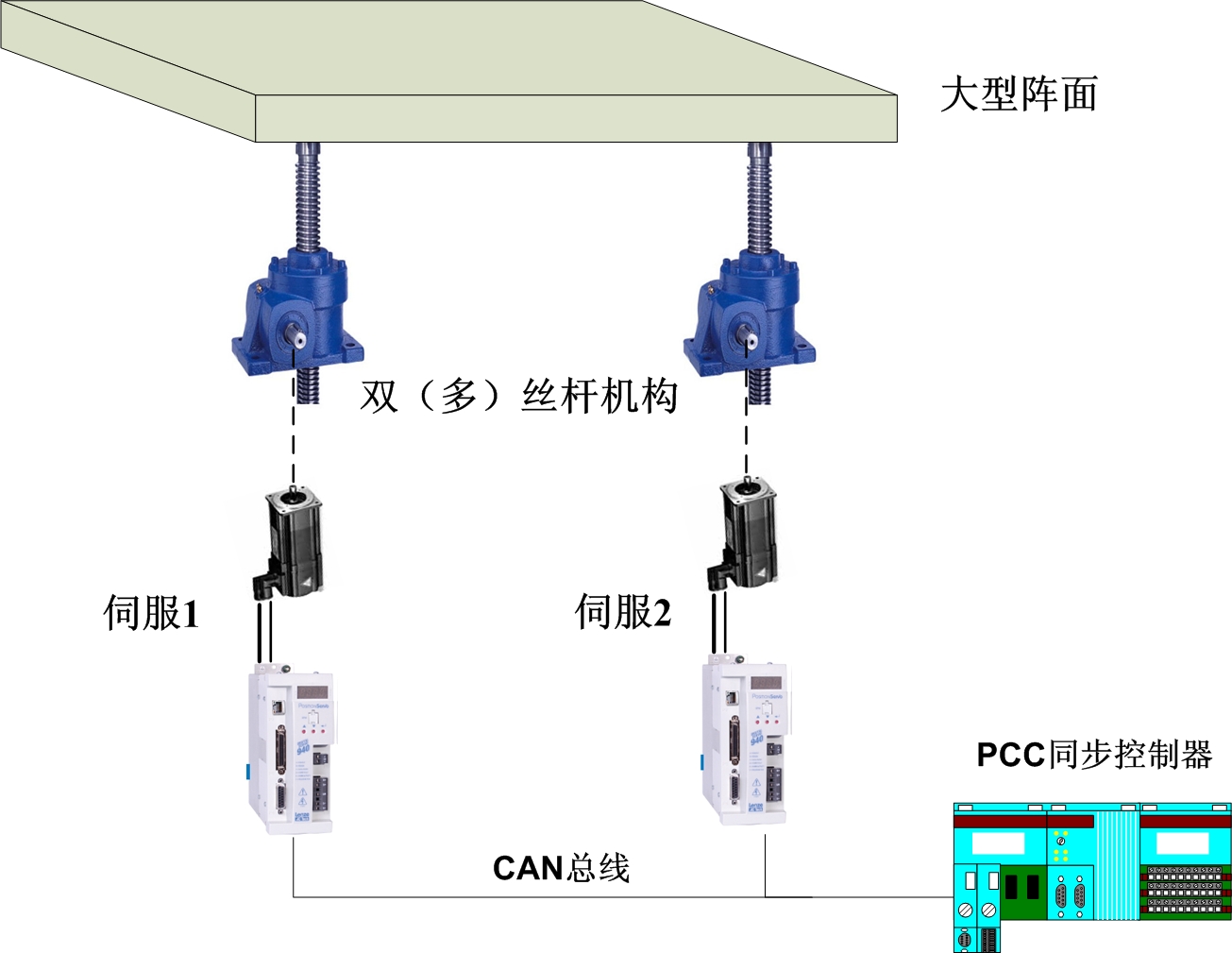
系統(tǒng)結(jié)構(gòu)如下圖所示:












 備案號(hào):
備案號(hào):
